21. Linear State Space Models#
Contents
“We may regard the present state of the universe as the effect of its past and the cause of its future” – Marquis de Laplace
In addition to what’s in Anaconda, this lecture will need the following libraries:
!pip install quantecon
Show code cell output
Requirement already satisfied: quantecon in /home/runner/miniconda3/envs/quantecon/lib/python3.12/site-packages (0.8.1)
Requirement already satisfied: numba>=0.49.0 in /home/runner/miniconda3/envs/quantecon/lib/python3.12/site-packages (from quantecon) (0.60.0)
Requirement already satisfied: numpy>=1.17.0 in /home/runner/miniconda3/envs/quantecon/lib/python3.12/site-packages (from quantecon) (1.26.4)
Requirement already satisfied: requests in /home/runner/miniconda3/envs/quantecon/lib/python3.12/site-packages (from quantecon) (2.32.3)
Requirement already satisfied: scipy>=1.5.0 in /home/runner/miniconda3/envs/quantecon/lib/python3.12/site-packages (from quantecon) (1.13.1)
Requirement already satisfied: sympy in /home/runner/miniconda3/envs/quantecon/lib/python3.12/site-packages (from quantecon) (1.14.0)
Requirement already satisfied: llvmlite<0.44,>=0.43.0dev0 in /home/runner/miniconda3/envs/quantecon/lib/python3.12/site-packages (from numba>=0.49.0->quantecon) (0.43.0)
Requirement already satisfied: charset-normalizer<4,>=2 in /home/runner/miniconda3/envs/quantecon/lib/python3.12/site-packages (from requests->quantecon) (3.3.2)
Requirement already satisfied: idna<4,>=2.5 in /home/runner/miniconda3/envs/quantecon/lib/python3.12/site-packages (from requests->quantecon) (3.7)
Requirement already satisfied: urllib3<3,>=1.21.1 in /home/runner/miniconda3/envs/quantecon/lib/python3.12/site-packages (from requests->quantecon) (2.2.3)
Requirement already satisfied: certifi>=2017.4.17 in /home/runner/miniconda3/envs/quantecon/lib/python3.12/site-packages (from requests->quantecon) (2024.8.30)
Requirement already satisfied: mpmath<1.4,>=1.1.0 in /home/runner/miniconda3/envs/quantecon/lib/python3.12/site-packages (from sympy->quantecon) (1.3.0)
21.1. Overview#
This lecture introduces the linear state space dynamic system.
The linear state space system is a generalization of the scalar AR(1) process we studied before.
This model is a workhorse that carries a powerful theory of prediction.
Its many applications include:
representing dynamics of higher-order linear systems
predicting the position of a system
predicting a geometric sum of future values of a variable like
non-financial income
dividends on a stock
the money supply
a government deficit or surplus, etc.
key ingredient of useful models
Friedman’s permanent income model of consumption smoothing.
Barro’s model of smoothing total tax collections.
Rational expectations version of Cagan’s model of hyperinflation.
Sargent and Wallace’s “unpleasant monetarist arithmetic,” etc.
Let’s start with some imports:
import matplotlib.pyplot as plt
import numpy as np
from quantecon import LinearStateSpace
from scipy.stats import norm
import random
21.2. The Linear State Space Model#
The objects in play are:
An
An IID sequence of
A
An
An
A
Here is the linear state-space system
21.2.1. Primitives#
The primitives of the model are
the matrices
shock distribution, which we have specialized to
the distribution of the initial condition
Given
Even without these draws, the primitives 1–3 pin down the probability distributions of
Later we’ll see how to compute these distributions and their moments.
21.2.1.1. Martingale Difference Shocks#
We’ve made the common assumption that the shocks are independent standardized normal vectors.
But some of what we say will be valid under the assumption that
A martingale difference sequence is a sequence that is zero mean when conditioned on past information.
In the present case, since
This is a weaker condition than that
21.2.2. Examples#
By appropriate choice of the primitives, a variety of dynamics can be represented in terms of the linear state space model.
The following examples help to highlight this point.
They also illustrate the wise dictum finding the state is an art.
21.2.2.1. Second-order Difference Equation#
Let
To map (21.2) into our state space system (21.1), we set
You can confirm that under these definitions, (21.1) and (21.2) agree.
The next figure shows the dynamics of this process when
def plot_lss(A,
C,
G,
n=3,
ts_length=50):
ar = LinearStateSpace(A, C, G, mu_0=np.ones(n))
x, y = ar.simulate(ts_length)
fig, ax = plt.subplots()
y = y.flatten()
ax.plot(y, 'b-', lw=2, alpha=0.7)
ax.grid()
ax.set_xlabel('time', fontsize=12)
ax.set_ylabel('$y_t$', fontsize=12)
plt.show()
ϕ_0, ϕ_1, ϕ_2 = 1.1, 0.8, -0.8
A = [[1, 0, 0 ],
[ϕ_0, ϕ_1, ϕ_2],
[0, 1, 0 ]]
C = np.zeros((3, 1))
G = [0, 1, 0]
plot_lss(A, C, G)
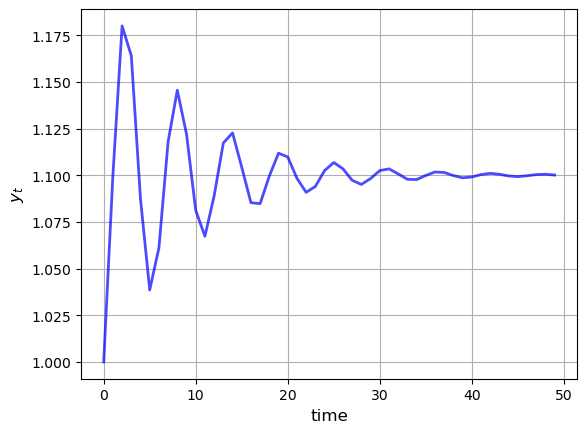
Later you’ll be asked to recreate this figure.
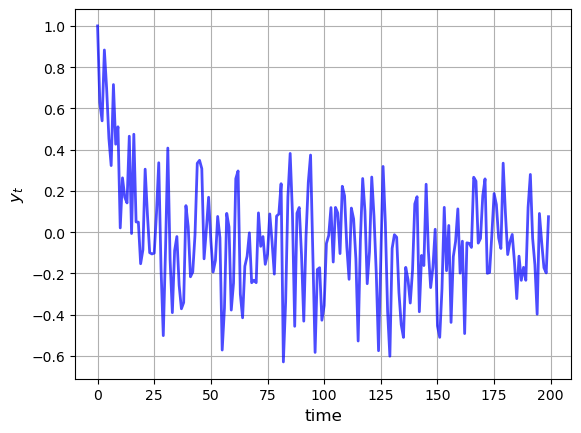
21.2.2.2. Univariate Autoregressive Processes#
We can use (21.1) to represent the model
where
To put this in the linear state space format we take
The matrix
The next figure shows the dynamics of this process when
ϕ_1, ϕ_2, ϕ_3, ϕ_4 = 0.5, -0.2, 0, 0.5
σ = 0.2
A_1 = [[ϕ_1, ϕ_2, ϕ_3, ϕ_4],
[1, 0, 0, 0 ],
[0, 1, 0, 0 ],
[0, 0, 1, 0 ]]
C_1 = [[σ],
[0],
[0],
[0]]
G_1 = [1, 0, 0, 0]
plot_lss(A_1, C_1, G_1, n=4, ts_length=200)
21.2.2.3. Vector Autoregressions#
Now suppose that
Then (21.3) is termed a vector autoregression.
To map this into (21.1), we set
where
21.2.2.4. Seasonals#
We can use (21.1) to represent
the deterministic seasonal
the indeterministic seasonal
In fact, both are special cases of (21.3).
With the deterministic seasonal, the transition matrix becomes
It is easy to check that
Such an
The indeterministic seasonal produces recurrent, but aperiodic, seasonal fluctuations.
21.2.2.5. Time Trends#
The model
We can represent this model in the linear state space form by taking
and starting at initial condition
In fact, it’s possible to use the state-space system to represent polynomial trends of any order.
For instance, we can represent the model
and starting at initial condition
It follows that
Then
21.2.3. Moving Average Representations#
A nonrecursive expression for
Representation (21.5) is a moving average representation.
It expresses
current and past values of the process
the initial condition
As an example of a moving average representation, let the model be
You will be able to show that
Substituting into the moving average representation (21.5), we obtain
where
The first term on the right is a cumulated sum of martingale differences and is therefore a martingale.
The second term is a translated linear function of time.
For this reason,
21.3. Distributions and Moments#
21.3.1. Unconditional Moments#
Using (21.1), it’s easy to obtain expressions for the
(unconditional) means of
We’ll explain what unconditional and conditional mean soon.
Letting
Here
The variance-covariance matrix of
Using
As with
As a matter of terminology, we will sometimes call
This is to distinguish
However, you should be aware that these “unconditional” moments do depend on
the initial distribution
21.3.1.1. Moments of the Observables#
Using linearity of expectations again we have
The variance-covariance matrix of
21.3.2. Distributions#
In general, knowing the mean and variance-covariance matrix of a random vector is not quite as good as knowing the full distribution.
However, there are some situations where these moments alone tell us all we need to know.
These are situations in which the mean vector and covariance matrix are all of the parameters that pin down the population distribution.
One such situation is when the vector in question is Gaussian (i.e., normally distributed).
This is the case here, given
our Gaussian assumptions on the primitives
the fact that normality is preserved under linear operations
In fact, it’s well-known that
In particular, given our Gaussian assumptions on the primitives and the
linearity of (21.1) we can see immediately that both
Since
But in fact we’ve already done this, in (21.6) and (21.7).
Letting
By similar reasoning combined with (21.8) and (21.9),
21.3.3. Ensemble Interpretations#
How should we interpret the distributions defined by (21.11)–(21.12)?
Intuitively, the probabilities in a distribution correspond to relative frequencies in a large population drawn from that distribution.
Let’s apply this idea to our setting, focusing on the distribution of
We can generate independent draws of
The next figure shows 20 simulations, producing 20 time series for
The system in question is the univariate autoregressive model (21.3).
The values of
def cross_section_plot(A,
C,
G,
T=20, # Set the time
ymin=-0.8,
ymax=1.25,
sample_size = 20, # 20 observations/simulations
n=4): # The number of dimensions for the initial x0
ar = LinearStateSpace(A, C, G, mu_0=np.ones(n))
fig, axes = plt.subplots(1, 2, figsize=(16, 5))
for ax in axes:
ax.grid(alpha=0.4)
ax.set_ylim(ymin, ymax)
ax = axes[0]
ax.set_ylim(ymin, ymax)
ax.set_ylabel('$y_t$', fontsize=12)
ax.set_xlabel('time', fontsize=12)
ax.vlines((T,), -1.5, 1.5)
ax.set_xticks((T,))
ax.set_xticklabels(('$T$',))
sample = []
for i in range(sample_size):
rcolor = random.choice(('c', 'g', 'b', 'k'))
x, y = ar.simulate(ts_length=T+15)
y = y.flatten()
ax.plot(y, color=rcolor, lw=1, alpha=0.5)
ax.plot((T,), (y[T],), 'ko', alpha=0.5)
sample.append(y[T])
y = y.flatten()
axes[1].set_ylim(ymin, ymax)
axes[1].set_ylabel('$y_t$', fontsize=12)
axes[1].set_xlabel('relative frequency', fontsize=12)
axes[1].hist(sample, bins=16, density=True, orientation='horizontal', alpha=0.5)
plt.show()
ϕ_1, ϕ_2, ϕ_3, ϕ_4 = 0.5, -0.2, 0, 0.5
σ = 0.1
A_2 = [[ϕ_1, ϕ_2, ϕ_3, ϕ_4],
[1, 0, 0, 0],
[0, 1, 0, 0],
[0, 0, 1, 0]]
C_2 = [[σ], [0], [0], [0]]
G_2 = [1, 0, 0, 0]
cross_section_plot(A_2, C_2, G_2)
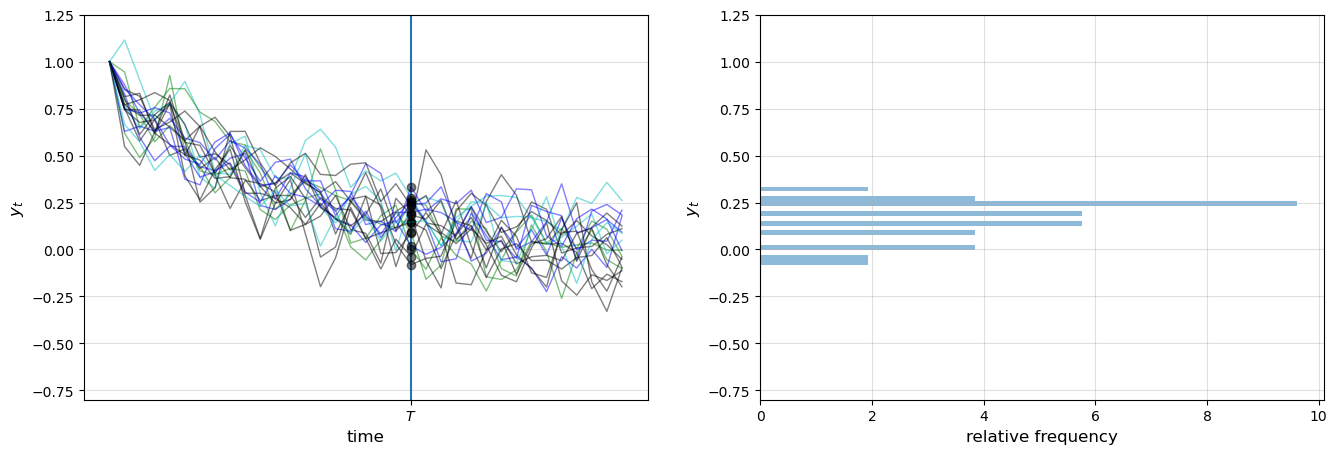
In the right-hand figure, these values are converted into a rotated histogram
that shows relative frequencies from our sample of 20
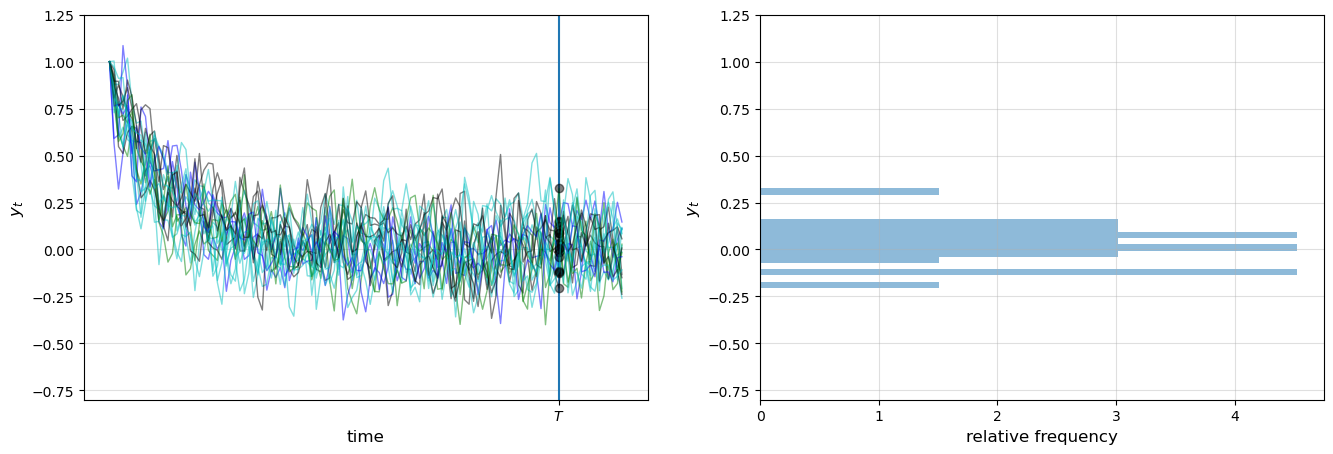
Here is another figure, this time with 100 observations
t = 100
cross_section_plot(A_2, C_2, G_2, T=t)
Let’s now try with 500,000 observations, showing only the histogram (without rotation)
T = 100
ymin=-0.8
ymax=1.25
sample_size = 500_000
ar = LinearStateSpace(A_2, C_2, G_2, mu_0=np.ones(4))
fig, ax = plt.subplots()
x, y = ar.simulate(sample_size)
mu_x, mu_y, Sigma_x, Sigma_y, Sigma_yx = ar.stationary_distributions()
f_y = norm(loc=float(mu_y.item()), scale=float(np.sqrt(Sigma_y.item())))
y = y.flatten()
ygrid = np.linspace(ymin, ymax, 150)
ax.hist(y, bins=50, density=True, alpha=0.4)
ax.plot(ygrid, f_y.pdf(ygrid), 'k-', lw=2, alpha=0.8, label='true density')
ax.set_xlim(ymin, ymax)
ax.set_xlabel('$y_t$', fontsize=12)
ax.set_ylabel('relative frequency', fontsize=12)
ax.legend(fontsize=12)
plt.show()
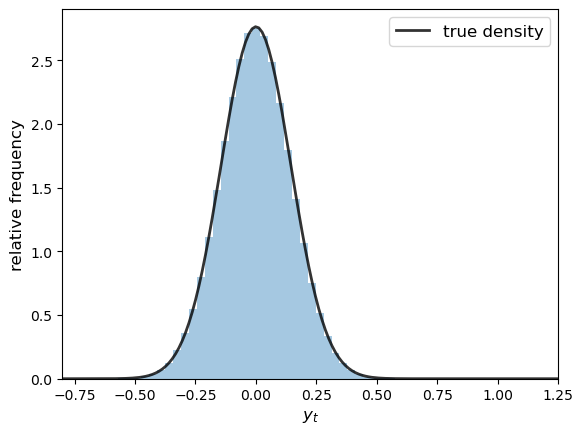
The black line is the population density of
The histogram and population distribution are close, as expected.
By looking at the figures and experimenting with parameters, you will gain a feel for how the population distribution depends on the model primitives listed above, as intermediated by the distribution’s parameters.
21.3.3.1. Ensemble Means#
In the preceding figure, we approximated the population distribution of
generating
recording each observation
histogramming this sample
Just as the histogram approximates the population distribution, the ensemble or cross-sectional average
approximates the expectation
Here’s a simulation comparing the ensemble averages and population means at time points
The parameters are the same as for the preceding figures,
and the sample size is relatively small (
I = 20
T = 50
ymin = -0.5
ymax = 1.15
ar = LinearStateSpace(A_2, C_2, G_2, mu_0=np.ones(4))
fig, ax = plt.subplots()
ensemble_mean = np.zeros(T)
for i in range(I):
x, y = ar.simulate(ts_length=T)
y = y.flatten()
ax.plot(y, 'c-', lw=0.8, alpha=0.5)
ensemble_mean = ensemble_mean + y
ensemble_mean = ensemble_mean / I
ax.plot(ensemble_mean, color='b', lw=2, alpha=0.8, label='$\\bar y_t$')
m = ar.moment_sequence()
population_means = []
for t in range(T):
μ_x, μ_y, Σ_x, Σ_y = next(m)
population_means.append(float(μ_y.item()))
ax.plot(population_means, color='g', lw=2, alpha=0.8, label=r'$G\mu_t$')
ax.set_ylim(ymin, ymax)
ax.set_xlabel('time', fontsize=12)
ax.set_ylabel('$y_t$', fontsize=12)
ax.legend(ncol=2)
plt.show()
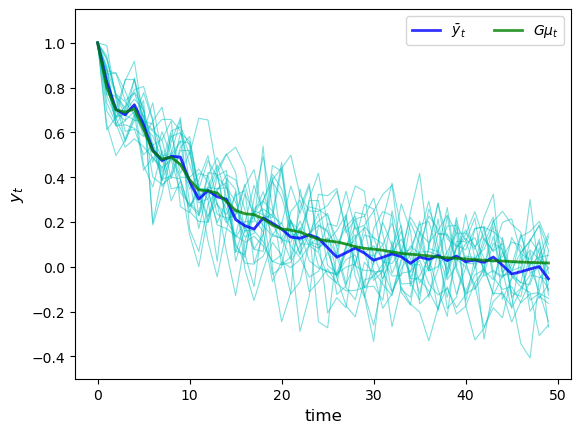
The ensemble mean for
The limit
(By long-run average we mean the average for an infinite (
Another application of the law of large numbers assures us that
21.3.4. Joint Distributions#
In the preceding discussion, we looked at the distributions of
This gives us useful information but doesn’t allow us to answer questions like
what’s the probability that
what’s the probability that the process
etc., etc.
Such questions concern the joint distributions of these sequences.
To compute the joint distribution of
From this rule we get
The Markov property
The marginal
In view of (21.1), the conditional densities are
21.3.4.1. Autocovariance Functions#
An important object related to the joint distribution is the autocovariance function
Elementary calculations show that
Notice that
21.4. Stationarity and Ergodicity#
Stationarity and ergodicity are two properties that, when they hold, greatly aid analysis of linear state space models.
Let’s start with the intuition.
21.4.1. Visualizing Stability#
Let’s look at some more time series from the same model that we analyzed above.
This picture shows cross-sectional distributions for
def cross_plot(A,
C,
G,
steady_state='False',
T0 = 10,
T1 = 50,
T2 = 75,
T4 = 100):
ar = LinearStateSpace(A, C, G, mu_0=np.ones(4))
if steady_state == 'True':
μ_x, μ_y, Σ_x, Σ_y, Σ_yx = ar.stationary_distributions()
ar_state = LinearStateSpace(A, C, G, mu_0=μ_x, Sigma_0=Σ_x)
ymin, ymax = -0.6, 0.6
fig, ax = plt.subplots()
ax.grid(alpha=0.4)
ax.set_ylim(ymin, ymax)
ax.set_ylabel('$y_t$', fontsize=12)
ax.set_xlabel('$time$', fontsize=12)
ax.vlines((T0, T1, T2), -1.5, 1.5)
ax.set_xticks((T0, T1, T2))
ax.set_xticklabels(("$T$", "$T'$", "$T''$"), fontsize=12)
for i in range(80):
rcolor = random.choice(('c', 'g', 'b'))
if steady_state == 'True':
x, y = ar_state.simulate(ts_length=T4)
else:
x, y = ar.simulate(ts_length=T4)
y = y.flatten()
ax.plot(y, color=rcolor, lw=0.8, alpha=0.5)
ax.plot((T0, T1, T2), (y[T0], y[T1], y[T2],), 'ko', alpha=0.5)
plt.show()
cross_plot(A_2, C_2, G_2)
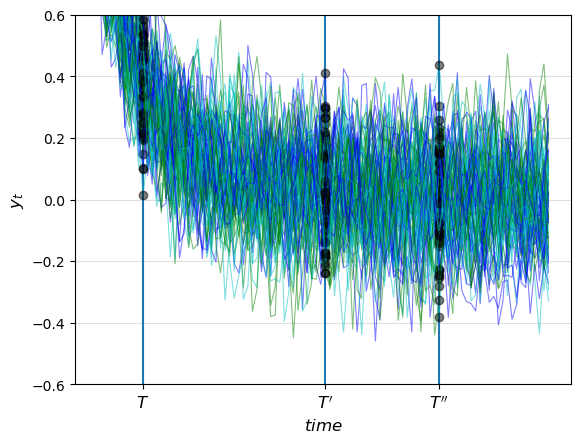
Note how the time series “settle down” in the sense that the distributions at
Apparently, the distributions of
When such a distribution exists it is called a stationary distribution.
21.4.2. Stationary Distributions#
In our setting, a distribution
Since
in the present case, all distributions are Gaussian
a Gaussian distribution is pinned down by its mean and variance-covariance matrix
we can restate the definition as follows:
where
21.4.3. Covariance Stationary Processes#
Let’s see what happens to the preceding figure if we start
cross_plot(A_2, C_2, G_2, steady_state='True')
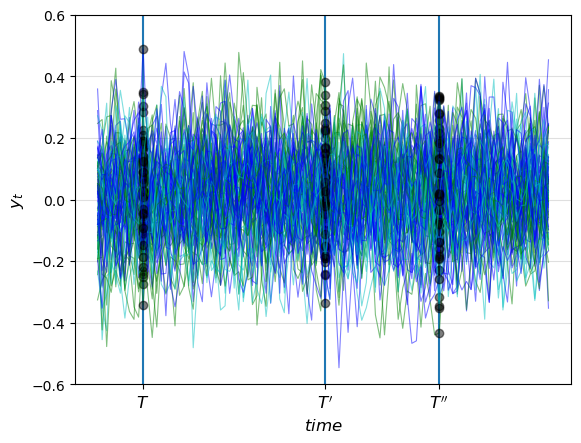
Now the differences in the observed distributions at
By
we’ve ensured that
Moreover, in view of (21.14), the autocovariance function takes the form
This motivates the following definition.
A process
both
In our setting,
21.4.4. Conditions for Stationarity#
21.4.4.1. The Globally Stable Case#
The difference equation
That is, if (np.absolute(np.linalg.eigvals(A)) < 1).all() == True.
The difference equation (21.7) also has a unique fixed point in this case, and, moreover
regardless of the initial conditions
This is the globally stable case — see these notes for more a theoretical treatment.
However, global stability is more than we need for stationary solutions, and often more than we want.
To illustrate, consider our second order difference equation example.
Here the state is
Because of the constant first component in the state vector, we will never have
How can we find stationary solutions that respect a constant state component?
21.4.4.2. Processes with a Constant State Component#
To investigate such a process, suppose that
where
Let
It follows that
Let
Assume now that the moduli of the eigenvalues of
Then (21.15) has a unique stationary solution, namely,
The stationary value of
The stationary values of
Notice that here
In conclusion, if
the moduli of the eigenvalues of
then the
Note
If the eigenvalues of
21.4.5. Ergodicity#
Let’s suppose that we’re working with a covariance stationary process.
In this case, we know that the ensemble mean will converge to
21.4.5.1. Averages over Time#
Ensemble averages across simulations are interesting theoretically, but in real life, we usually observe only a single realization
So now let’s take a single realization and form the time-series averages
Do these time series averages converge to something interpretable in terms of our basic state-space representation?
The answer depends on something called ergodicity.
Ergodicity is the property that time series and ensemble averages coincide.
More formally, ergodicity implies that time series sample averages converge to their expectation under the stationary distribution.
In particular,
In our linear Gaussian setting, any covariance stationary process is also ergodic.
21.5. Noisy Observations#
In some settings, the observation equation
Often this error term represents the idea that the true state can only be observed imperfectly.
To include an error term in the observation we introduce
An IID sequence of
A
and extend the linear state-space system to
The sequence
The process
The unconditional moments of
The variance-covariance matrix of
The distribution of
21.6. Prediction#
The theory of prediction for linear state space systems is elegant and simple.
21.6.1. Forecasting Formulas – Conditional Means#
The natural way to predict variables is to use conditional distributions.
For example, the optimal forecast of
The right-hand side follows from
That
The one-step-ahead forecast error is
The covariance matrix of the forecast error is
More generally, we’d like to compute the
With a bit of algebra, we obtain
In view of the IID property, current and past state values provide no information about future values of the shock.
Hence
It now follows from linearity of expectations that the
The
21.6.2. Covariance of Prediction Errors#
It is useful to obtain the covariance matrix of the vector of
Evidently,
Under particular conditions,
Equation (21.23) is an example of a discrete Lyapunov equation in the covariance matrix
A sufficient condition for
Weaker sufficient conditions for convergence associate eigenvalues equaling or exceeding one in modulus with elements of
21.7. Code#
Our preceding simulations and calculations are based on code in the file lss.py from the QuantEcon.py package.
The code implements a class for handling linear state space models (simulations, calculating moments, etc.).
One Python construct you might not be familiar with is the use of a generator function in the method moment_sequence().
Go back and read the relevant documentation if you’ve forgotten how generator functions work.
Examples of usage are given in the solutions to the exercises.
21.8. Exercises#
Exercise 21.1
In several contexts, we want to compute forecasts of geometric sums of future random variables governed by the linear state-space system (21.1).
We want the following objects
Forecast of a geometric sum of future
Forecast of a geometric sum of future
These objects are important components of some famous and interesting dynamic models.
For example,
if
if
Show that:
and
what must the modulus for every eigenvalue of
Solution to Exercise 21.1
Suppose that every eigenvalue of
It then follows that
This leads to our formulas:
Forecast of a geometric sum of future
Forecast of a geometric sum of future